

ホーム > 野菜 > 野菜の情報 > キャベツ栽培軽労化への取り組み~生育診断アドバイスシステムと収穫支援機械の開発~
話題 野菜情報 2024年7月号
キャベツ栽培軽労化への取り組み~生育診断アドバイスシステムと収穫支援機械の開発~
愛知工業大学 情報科学部 情報科学科 教授 塚田 敏彦

1 はじめに
愛知県は製造業が盛んなことで有名ですが、農業総産出額も2922億円(2021年)で全国8位です。そのうちキャベツの産出額は、181億円で約6%を占め、全国シェアも19%と常に全国1位の座を競っている状況です。
このようにキャベツは愛知県にとって重要な農産物です。しかし、2020年に愛知県農業総合試験場が生産者に対して行ったヒアリング調査では、将来の生産継続、順位維持に対して悲観的な結果が報告されています。加えて、キャベツを生産する農作業が身体的に負担の大きい重労働であることから、担い手の高齢化に伴い、農作業の軽労化への強い要望が挙げられています。
キャベツの収穫作業は、広大な圃場に定植されたキャベツの結球状態を確認しながら刈り取り、1個当たり1キログラムを超えるキャベツを作業車に搭載して運搬し、収穫の総重量は300キログラムに及ぶこともあります。国内大手の農機具メーカーから販売されている大型の収穫機は、圃場のキャベツをバリカンのように一斉に刈り採りする方式です。しかし、愛知県のキャベツ収穫の多くは、基準の大きさに達した結球を選別して収穫する「拾い採り」方式で行われ、「一斉収穫」に比べて高い単価で取り引きされています。こうした地域特有の収穫方法が有利販売にもつながっているため、大型の一斉収穫機の適用は困難です。収穫作業には運搬台車など、一部で機械の導入が進められていますが、現状では力作業の補助程度にとどまっており、機械の知能化はまだ普及していません。
そこでわれわれは、愛知県からの委託により公益財団法人科学技術交流財団が実施している「知の拠点あいち重点研究プロジェクト第Ⅳ期(https://www.astf-kha.jp/project/about/)」にて、これらの課題に対処するための技術開発に取り組んでいます。それは、キャベツの生育をそろえることで拾い採りの回数を減らすことと、収穫作業を支援する機械を開発して収穫作業を楽に行えるようにする取り組みです。
以下にこの2つの取り組みの具体的な内容とこれまでの主な成果を紹介します。
このようにキャベツは愛知県にとって重要な農産物です。しかし、2020年に愛知県農業総合試験場が生産者に対して行ったヒアリング調査では、将来の生産継続、順位維持に対して悲観的な結果が報告されています。加えて、キャベツを生産する農作業が身体的に負担の大きい重労働であることから、担い手の高齢化に伴い、農作業の軽労化への強い要望が挙げられています。
キャベツの収穫作業は、広大な圃場に定植されたキャベツの結球状態を確認しながら刈り取り、1個当たり1キログラムを超えるキャベツを作業車に搭載して運搬し、収穫の総重量は300キログラムに及ぶこともあります。国内大手の農機具メーカーから販売されている大型の収穫機は、圃場のキャベツをバリカンのように一斉に刈り採りする方式です。しかし、愛知県のキャベツ収穫の多くは、基準の大きさに達した結球を選別して収穫する「拾い採り」方式で行われ、「一斉収穫」に比べて高い単価で取り引きされています。こうした地域特有の収穫方法が有利販売にもつながっているため、大型の一斉収穫機の適用は困難です。収穫作業には運搬台車など、一部で機械の導入が進められていますが、現状では力作業の補助程度にとどまっており、機械の知能化はまだ普及していません。
そこでわれわれは、愛知県からの委託により公益財団法人科学技術交流財団が実施している「知の拠点あいち重点研究プロジェクト第Ⅳ期(https://www.astf-kha.jp/project/about/)」にて、これらの課題に対処するための技術開発に取り組んでいます。それは、キャベツの生育をそろえることで拾い採りの回数を減らすことと、収穫作業を支援する機械を開発して収穫作業を楽に行えるようにする取り組みです。
以下にこの2つの取り組みの具体的な内容とこれまでの主な成果を紹介します。
2 拾い採り収穫回数の削減に向けて
キャベツの拾い採りにおける収穫回数を減らして作業を省力化するため、ドローンによる空撮画像から圃場内のキャベツの生育のバラツキを把握するとともに、生育のバラツキ低減に向けた栽培技術の提案を行っています。
ドローンによる空撮画像から定量的なデータを安定して取得するために、画像の取得方法の最適化と、開張(生育の指標となる葉の開き具合)と類似した値を抽出する技術を開発しました。その結果、採用したドローン機器(Matrice300+P1)であれば、晴れもしくは曇りの日の太陽高度が30度以上の時間帯で、撮影高度20メートルで2ミリメートル、40メートルで4ミリメートル程度の解像度の画像が、安定的に取得可能であることが分かりました。これにドローン本体の高精度GPS(RTK-GPS)を用いた位置決め精度(XY水平方向:2センチメートル程度)を加味すると、フライト高度を50メートルとした場合、水平方向の誤差は最大5センチ以下で位置決めが可能だと明らかになりました。
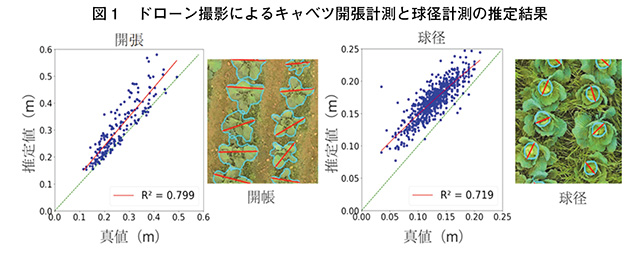
また、生育状態の指標となる開張は、キャベツの葉領域を抽出後、多角形で近似し、その多角形の頂点を内側に含む最小円の直径としました。これにより、生育初期から中期であれば、高精度(決定係数※0.65~0.77)な推定が可能であることも明らかになりました。AI技術(物体検知技術Mask R-CNN)を用いた場合にも、同様の精度での計測が可能であり、空撮や近接画像から、生育初~中期の開張の誤差を13%以下で高精度に推定することができました。また、空撮による球径(外葉を含まないキャベツの結球部分の直径)の推定も高い精度(決定係数 0.719)で可能だと分かりました。さらに、球径と結球重の間には強い相関(決定係数 0.894)があるため、球径を利用した収量の推定も可能であるという見込みも得られました(図1)。
※予測式の精度を表す値で、1に近いほど予測モデルの説得力を持つ。
以上の方法により、生育状況を把握する見込みは立ちました。次に必要なのは、生育状況が悪い株の生育を回復して生育をそろえる技術です。これには適度な追肥が効果的であろうと仮説を立てました。その仮説を検証するために、追肥の時期や量を変えることにより、生育状況をそろえる(斉一性向上)効果を実験しました。まず初年度には、追肥量に応じてキャベツの生育が向上することを確認し、次年度は、キャベツの生育に応じて追肥量を変える試験をし、追肥制御による斉一性向上効果を検証しました。
その結果、開張を指標としてキャベツの追肥量を3段階に分け、生育度合いに応じて追肥量を増減させる追肥制御を行うことで、結球のそろいが良くなることを確認しました(図2)。
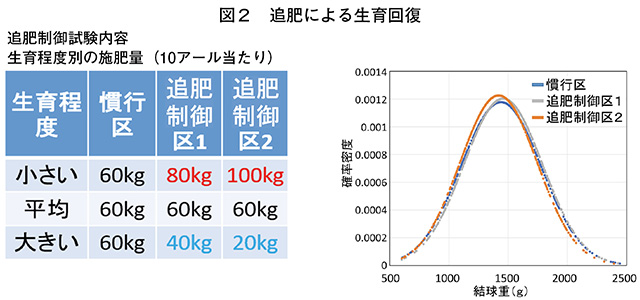
このグラフは、キャベツの生育に合わせて施肥の量を変える可変施肥の効果を調べる可変施肥試験の結果を表しています。通常の栽培では、施肥量はキャベツの大きさによらず10アール当たり60キログラムなのですが、可変施肥試験ではその量を変更し、小さいキャベツには多めに、大きいキャベツには少なめに、施肥を行っています。
右のグラフは収穫したキャベツの大きさの分布を表しています。真ん中のピークを見ると、青線の慣行区に比べて、それ以外の追肥量を変えた区画の線が上にきていることが分かります。これは、可変施肥により1400グラムくらいのちょうど良い大きさのキャベツが増えた、ということを意味しています。
同様に、開張に基づいて追肥量を2段階(多い/少ない)に分けた場合では、多くの追肥を行った場合の方が斉一化効果が高いことが分かりました(図3)。
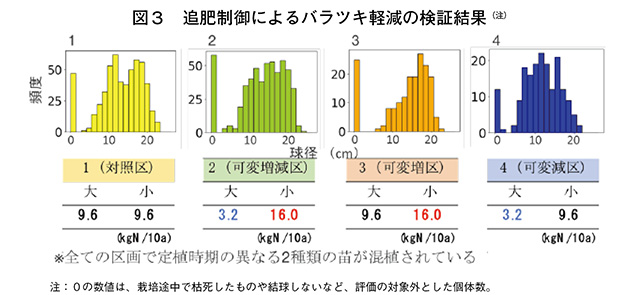
これは図2と類似した試験を実施し、肥料を増やすべきか減らすべきか、という点について検証したものです。こちらの試験では、定植時期の異なる2種類の苗を用意し、生育の違いを人為的に作っています。黄色のグラフを見ると、2つピークが出来ています。これは最初の生育が異なる2種類の苗を混ぜているので、収穫したキャベツの大きさも、初期の生育を反映して大小の2つに分かれる傾向があることを示しています。そして残りの3つのグラフから、生育に合わせて施肥量を変えることによって、収穫するキャベツの大きさがそろってくることが分かります。オレンジ色のグラフにあるように、小さいキャベツの施肥量を増やすという条件で、特にキャベツの大きさがそろうことが分かりました。
これらの圃場試験の結果から、キャベツの大きさを元に生育を判断し、その生育に合わせた施肥を行うことで、収穫時のキャベツの玉の大きさをそろえることができることが分かりました。
しかし、営農現場において施肥量は削減することが好ましいことから、斉一化への寄与率は劣りますが、肥料を削減する減肥主体の可変施肥の検証が必要だと考えています。
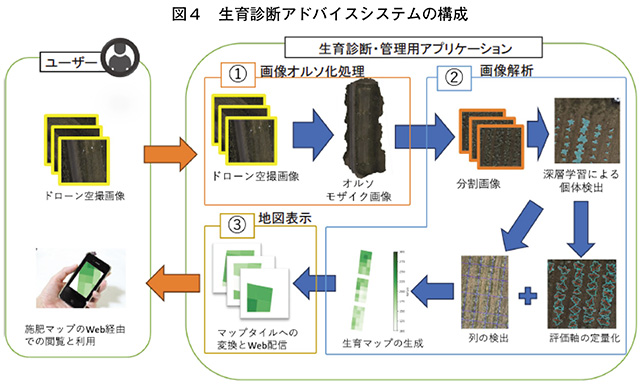
さらに、開発中の技術を広く活用してもらうために、フリーのソフトウェアを組み合わせ、生育診断・管理用アプリケーションソフトウェア「生育診断アドバイスシステム」を試作しました。これは、(1)ドローンで個別に撮像した画像を統合する画像オルソ化(地形の凹凸や画像の傾きの影響を取り除き、位置、面積、距離を正確に表示する補正)処理プログラム(2)統合した画像から開張を計測して生育把握・診断を行う生育診断・診断用画像解析プログラム(3)診断結果を分かりやすく表示するための地図表示プログラム-の3つのプログラムから構成されています(図4)。クラウド上で運用可能な構成となっており、利用者数やタスク数に合わせた拡張可能なサービスの提供を見込んでいます。クラウド運用時に複数のプラットフォームを利用することにより、高速処理(処理速度 3000株/時間)も達成できる見込みであり、今後、試験運用を実施し、評価を行う予定です。
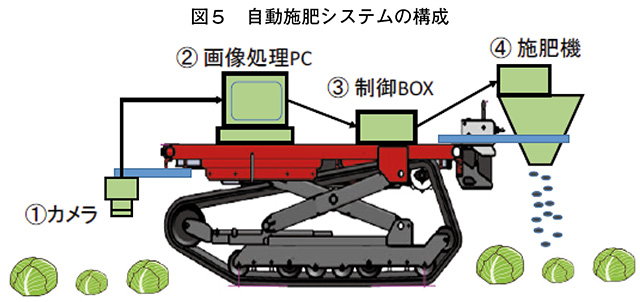
また、自動施肥技術の開発も行っています。これは常用管理機に搭載した施肥機能に、生育状況に応じた施肥量の制御機能を追加したシステムです。具体的には、畝上を移動する管理機の前方に畝を撮影するカメラを取り付けて株毎に画像を撮影します。その画像から株毎の開張を計測して生育状況を把握し、生育状況に応じた量の施肥を行う仕組みです(図5)。これまでに、生育に応じた量の施肥ができるところまでの確認を終え、現在は最適な施肥量の設定に取り組んでいるところです。
ドローンによる空撮画像から定量的なデータを安定して取得するために、画像の取得方法の最適化と、開張(生育の指標となる葉の開き具合)と類似した値を抽出する技術を開発しました。その結果、採用したドローン機器(Matrice300+P1)であれば、晴れもしくは曇りの日の太陽高度が30度以上の時間帯で、撮影高度20メートルで2ミリメートル、40メートルで4ミリメートル程度の解像度の画像が、安定的に取得可能であることが分かりました。これにドローン本体の高精度GPS(RTK-GPS)を用いた位置決め精度(XY水平方向:2センチメートル程度)を加味すると、フライト高度を50メートルとした場合、水平方向の誤差は最大5センチ以下で位置決めが可能だと明らかになりました。
また、生育状態の指標となる開張は、キャベツの葉領域を抽出後、多角形で近似し、その多角形の頂点を内側に含む最小円の直径としました。これにより、生育初期から中期であれば、高精度(決定係数※0.65~0.77)な推定が可能であることも明らかになりました。AI技術(物体検知技術Mask R-CNN)を用いた場合にも、同様の精度での計測が可能であり、空撮や近接画像から、生育初~中期の開張の誤差を13%以下で高精度に推定することができました。また、空撮による球径(外葉を含まないキャベツの結球部分の直径)の推定も高い精度(決定係数 0.719)で可能だと分かりました。さらに、球径と結球重の間には強い相関(決定係数 0.894)があるため、球径を利用した収量の推定も可能であるという見込みも得られました(図1)。
※予測式の精度を表す値で、1に近いほど予測モデルの説得力を持つ。
以上の方法により、生育状況を把握する見込みは立ちました。次に必要なのは、生育状況が悪い株の生育を回復して生育をそろえる技術です。これには適度な追肥が効果的であろうと仮説を立てました。その仮説を検証するために、追肥の時期や量を変えることにより、生育状況をそろえる(斉一性向上)効果を実験しました。まず初年度には、追肥量に応じてキャベツの生育が向上することを確認し、次年度は、キャベツの生育に応じて追肥量を変える試験をし、追肥制御による斉一性向上効果を検証しました。
その結果、開張を指標としてキャベツの追肥量を3段階に分け、生育度合いに応じて追肥量を増減させる追肥制御を行うことで、結球のそろいが良くなることを確認しました(図2)。
このグラフは、キャベツの生育に合わせて施肥の量を変える可変施肥の効果を調べる可変施肥試験の結果を表しています。通常の栽培では、施肥量はキャベツの大きさによらず10アール当たり60キログラムなのですが、可変施肥試験ではその量を変更し、小さいキャベツには多めに、大きいキャベツには少なめに、施肥を行っています。
右のグラフは収穫したキャベツの大きさの分布を表しています。真ん中のピークを見ると、青線の慣行区に比べて、それ以外の追肥量を変えた区画の線が上にきていることが分かります。これは、可変施肥により1400グラムくらいのちょうど良い大きさのキャベツが増えた、ということを意味しています。
同様に、開張に基づいて追肥量を2段階(多い/少ない)に分けた場合では、多くの追肥を行った場合の方が斉一化効果が高いことが分かりました(図3)。
これは図2と類似した試験を実施し、肥料を増やすべきか減らすべきか、という点について検証したものです。こちらの試験では、定植時期の異なる2種類の苗を用意し、生育の違いを人為的に作っています。黄色のグラフを見ると、2つピークが出来ています。これは最初の生育が異なる2種類の苗を混ぜているので、収穫したキャベツの大きさも、初期の生育を反映して大小の2つに分かれる傾向があることを示しています。そして残りの3つのグラフから、生育に合わせて施肥量を変えることによって、収穫するキャベツの大きさがそろってくることが分かります。オレンジ色のグラフにあるように、小さいキャベツの施肥量を増やすという条件で、特にキャベツの大きさがそろうことが分かりました。
これらの圃場試験の結果から、キャベツの大きさを元に生育を判断し、その生育に合わせた施肥を行うことで、収穫時のキャベツの玉の大きさをそろえることができることが分かりました。
しかし、営農現場において施肥量は削減することが好ましいことから、斉一化への寄与率は劣りますが、肥料を削減する減肥主体の可変施肥の検証が必要だと考えています。
さらに、開発中の技術を広く活用してもらうために、フリーのソフトウェアを組み合わせ、生育診断・管理用アプリケーションソフトウェア「生育診断アドバイスシステム」を試作しました。これは、(1)ドローンで個別に撮像した画像を統合する画像オルソ化(地形の凹凸や画像の傾きの影響を取り除き、位置、面積、距離を正確に表示する補正)処理プログラム(2)統合した画像から開張を計測して生育把握・診断を行う生育診断・診断用画像解析プログラム(3)診断結果を分かりやすく表示するための地図表示プログラム-の3つのプログラムから構成されています(図4)。クラウド上で運用可能な構成となっており、利用者数やタスク数に合わせた拡張可能なサービスの提供を見込んでいます。クラウド運用時に複数のプラットフォームを利用することにより、高速処理(処理速度 3000株/時間)も達成できる見込みであり、今後、試験運用を実施し、評価を行う予定です。
また、自動施肥技術の開発も行っています。これは常用管理機に搭載した施肥機能に、生育状況に応じた施肥量の制御機能を追加したシステムです。具体的には、畝上を移動する管理機の前方に畝を撮影するカメラを取り付けて株毎に画像を撮影します。その画像から株毎の開張を計測して生育状況を把握し、生育状況に応じた量の施肥を行う仕組みです(図5)。これまでに、生育に応じた量の施肥ができるところまでの確認を終え、現在は最適な施肥量の設定に取り組んでいるところです。
3 収穫作業の軽労化へ向けて
愛知県では家族経営が多く、収穫したキャベツを運搬する作業車の運転は、主に家族の中でも機械操作が得意な熟練の働き手によって行われ、収穫作業はそれ以外の家族やアルバイトにより行われる場合が多いです。そのため、われわれの収穫支援技術開発の方針は、作業車の移動を自律化することで運転操作を省き、熟練の働き手が収穫作業に加わることで各人の作業軽労化を目指すというものです。
まずプラットフォーム整備の取り組みとして、現在はガソリンエンジンで駆動している作業車を、知能化のための制御が可能な電気モーター駆動とする電動化改造を行いました。自動車の自動運転が電気自動車の出現によってもたらされたように、作業車を電動化することから取り組んでいます。
一方で、ガソリン駆動の作業車をリモートコントロールできるように改造して、どのような自律的な動きを実現すれば、収穫者の作業の軽労化につながるのかを検証しました。
その結果、収穫作業の進み具合はほぼ一定であるため、その進み具合に合わせた低速移動が必要であることがわかりました。ただし、この場合でも畝を踏まないよう畝に沿った直進は必須で、そのためにはリモートで細かい速度調整が必要です。しかし、農業従事者へのヒアリングを実施したところ、収穫作業の進み具合を認識して移動制御が行われることも有用ではあるが、導入コストを勘案すると、必要以上の自動化は必要とされないことも分かりました。そこで、自動化制御実現へのマイルストーン(通過点)として、超低速での定速移動や、簡単な動作や声などに反応して間欠的な移動を行う機能を現在開発中です。
2023年12月には、愛知県農業総合試験場東三河研究所にて、試作した電動化作業車とリモコン操作作業車(ガソリン駆動)を用いた公開実証実験を行いました(写真)。従来の作業車と、試作中の簡単操作・間欠移動する作業車とで実際に収穫作業を行い、それぞれの作業負荷を計測して効果を測定しました。またこの場では、農協関係者などキャベツ生産に関わる方々にわれわれの取り組みを紹介するとともに、意見収集を行いました。
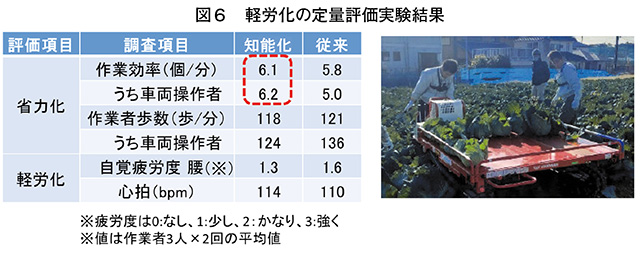
軽労化の定量評価実験では、既存の作業車による従来通りの収穫作業と、知能化機能をリモコン操作で代用した作業車による収穫作業とを比較しました。作業は3人で行い、従来収穫作業では1人が作業車の運転操作を行いました。知能化機能をリモコン操作で代用した作業車による収穫作業では、1人が手を使ったジェスチャーで合図を出し、それに応じてリモコン操作をしながら収穫作業を行いました。作業の評価は、作業効率(1分間当たりの収穫個数)、作業者の移動歩数、心拍数と主観的な自覚疲労度の申告により行いました(図6)。結果は、従来収穫作業では車両を操作していた者が、知能化制御を模擬した作業車の場合は収穫に参加できる割合が増えることから、作業効率では大幅な効果が確認できましたが、それ以外では有意な向上は認められず、現在も継続して効果の評価を実施中です。

まずプラットフォーム整備の取り組みとして、現在はガソリンエンジンで駆動している作業車を、知能化のための制御が可能な電気モーター駆動とする電動化改造を行いました。自動車の自動運転が電気自動車の出現によってもたらされたように、作業車を電動化することから取り組んでいます。
一方で、ガソリン駆動の作業車をリモートコントロールできるように改造して、どのような自律的な動きを実現すれば、収穫者の作業の軽労化につながるのかを検証しました。
その結果、収穫作業の進み具合はほぼ一定であるため、その進み具合に合わせた低速移動が必要であることがわかりました。ただし、この場合でも畝を踏まないよう畝に沿った直進は必須で、そのためにはリモートで細かい速度調整が必要です。しかし、農業従事者へのヒアリングを実施したところ、収穫作業の進み具合を認識して移動制御が行われることも有用ではあるが、導入コストを勘案すると、必要以上の自動化は必要とされないことも分かりました。そこで、自動化制御実現へのマイルストーン(通過点)として、超低速での定速移動や、簡単な動作や声などに反応して間欠的な移動を行う機能を現在開発中です。
2023年12月には、愛知県農業総合試験場東三河研究所にて、試作した電動化作業車とリモコン操作作業車(ガソリン駆動)を用いた公開実証実験を行いました(写真)。従来の作業車と、試作中の簡単操作・間欠移動する作業車とで実際に収穫作業を行い、それぞれの作業負荷を計測して効果を測定しました。またこの場では、農協関係者などキャベツ生産に関わる方々にわれわれの取り組みを紹介するとともに、意見収集を行いました。
軽労化の定量評価実験では、既存の作業車による従来通りの収穫作業と、知能化機能をリモコン操作で代用した作業車による収穫作業とを比較しました。作業は3人で行い、従来収穫作業では1人が作業車の運転操作を行いました。知能化機能をリモコン操作で代用した作業車による収穫作業では、1人が手を使ったジェスチャーで合図を出し、それに応じてリモコン操作をしながら収穫作業を行いました。作業の評価は、作業効率(1分間当たりの収穫個数)、作業者の移動歩数、心拍数と主観的な自覚疲労度の申告により行いました(図6)。結果は、従来収穫作業では車両を操作していた者が、知能化制御を模擬した作業車の場合は収穫に参加できる割合が増えることから、作業効率では大幅な効果が確認できましたが、それ以外では有意な向上は認められず、現在も継続して効果の評価を実施中です。
4 おわりに
本稿ではプロジェクトの取り組み状況と主な成果を中心に紹介しましたが、本プロジェクトは、産官学農のメンバーから構成されていることが一つの特徴です。
農産物に関する研究を担う農学系大学、支援機械の研究を行う工学系大学、それぞれの成果を形にするメーカー、愛知県農業総合試験場、あいち産業科学技術総合センター、公益財団法人科学技術交流財団、そして欠かせないのが実際に愛知県でキャベツを生産する農家です。さらに、農作業の受託事業を行う農業法人も参画して、開発技術を用いた将来の事業化への検討も並行して進めています。
これらのメンバーが知恵を出し、忌憚のない意見を出し合いながら開発を進めています。プロジェクトは2025年3月に終了予定です。終了時には公開セミナーとして成果披露を行います。ぜひ、公開セミナーへ足をお運びいただき、ご意見・ご感想をお聞かせいただければ幸いです。
塚田 敏彦(つかだ としひこ)
愛知工業大学 情報科学部 情報科学科 教授
【略歴】
1988年4月 株式会社豊田中央研究所入社。自動車生産工程の計測・検査技術の研究、開発に従事。
2017年4月より現職
農産物に関する研究を担う農学系大学、支援機械の研究を行う工学系大学、それぞれの成果を形にするメーカー、愛知県農業総合試験場、あいち産業科学技術総合センター、公益財団法人科学技術交流財団、そして欠かせないのが実際に愛知県でキャベツを生産する農家です。さらに、農作業の受託事業を行う農業法人も参画して、開発技術を用いた将来の事業化への検討も並行して進めています。
これらのメンバーが知恵を出し、忌憚のない意見を出し合いながら開発を進めています。プロジェクトは2025年3月に終了予定です。終了時には公開セミナーとして成果披露を行います。ぜひ、公開セミナーへ足をお運びいただき、ご意見・ご感想をお聞かせいただければ幸いです。
塚田 敏彦(つかだ としひこ)
愛知工業大学 情報科学部 情報科学科 教授
【略歴】
1988年4月 株式会社豊田中央研究所入社。自動車生産工程の計測・検査技術の研究、開発に従事。
2017年4月より現職









