 (野菜情報 2019年5月号)
(野菜情報 2019年5月号)
野菜の自動収穫ロボットの可能性と開発事例
~自動運転技術の農業への応用~
立命館大学 理工学部 教授 深尾 隆則

1 はじめに
農業従事者の減少や高齢化などによる労働力不足が進んでおり、キャベツなどの野菜は水稲に比べて単位面積当たりの労働力が多く必要であるため、新たな労働力確保は喫緊の課題となっている。また全体の労働時間の半分以上を占める収穫から出荷までの作業をいかに効率的に行うかが、労働時間の平準化の観点から重要である。さらに機械化一貫体系が整備されている野菜もあるが、作業機械の操作に高度な技術を要することも多い。これらを解決することは、圃場の規模拡大と所得向上につながるものであり、無人作業が実現できる自動化・ロボット化が大いに期待されている。
このような背景から、国立研究開発法人 農業・食品産業技術総合研究機構 生物系特定産業技術研究支援センター「革新的技術開発・緊急展開事業(うち人工知能未来農業創造プロジェクト)」(2017~2020年度)では、キャベツやたまねぎなどの露地野菜を対象とし、収穫から出荷までを自動で行うシステムの構築を目指して研究開発を行っている。
技術的な面からは、われわれが現在までに行ってきた自動車の自動運転などに必要な人工知能やセンシング、制御という手法とほぼ同様なものを用いることで可能となる(写真1)。これらの手法は、ロボティクスと呼ばれる分野の技術であり、さまざまな機械やシステムの自動化に必要なものであり、今後、広い分野に応用可能なものである。

本稿では、現在、開発中のキャベツ自動収穫機を中心に、コンテナ自動運搬車、たまねぎ自動収穫機について紹介し、農業における自動化ロボットなどの可能性を感じてもらいたい。
2 キャベツ自動収穫機
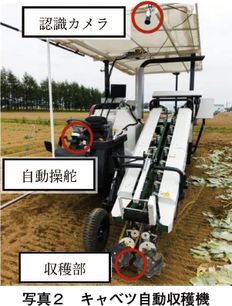
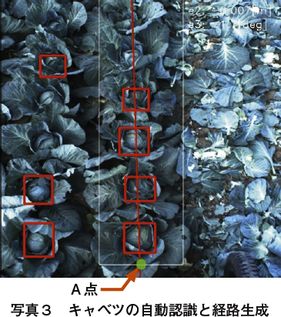
ヤンマー製のキャベツ収穫機を共同研究機関のオサダ農機株式会社が改造した車両(写真2)を使用し、これを自動化することによりキャベツの自動収穫機を開発している。具体的には、まず収穫機の上方に取り付けられたカメラを用いてキャベツの検出を行い、キャベツの列に沿った経路を生成する。次に、生成した経路に追従するようにハンドルの制御を行う。ここで、キャベツの検出には、人工知能の一つであるディープラーニング(深層学習)と呼ばれる手法を用いており、写真3のように正確にキャベツの玉の部分を認識することが可能である。黄緑のA点は引き抜く一番手前のキャベツが来るべきポイントを、赤い線は車両が進むべき経路を意味する。また、キャベツの茎の部分を収穫機の収穫部(写真4)で引き抜く必要があり、収穫部を茎にうまく当てなければならないが、これは側方からのカメラ画像で認識し、土壌の高さを計測することなどで自動的に調整している(写真5)。なお、収穫時の車両速度は人と同程度で秒速約0.15メートルである。


走行開始時や停止時、旋回時などの速度調整は、レバーを自動で動作させることで実現しており、またキャベツがない圃場端では、人工衛星からの電波をRTK-GNSS受信機(注1)で受けて、位置精度が約2センチメートル、角度精度が約0.5度を実現し、自動旋回などを行っている。なお、このRTK-GNSS受信機は共同研究機関の長田電機株式会社が開発しており、受信機を3基利用することで、位置、方位、車両の傾き(ロール・ピッチ)を計測することが可能である。
将来的には、キャベツ収穫機の収穫部などを交換することにより、はくさい、ブロッコリーにも応用できることを目指している。
注1:リアルタイムキネマティック(RTK:Real Time Kinematic)とは、複数の衛星測位システム(GNSS:Global Navigation Satellite System)を利用して大気中の水分や電離層の影響を補正しセンチメートルクラスの高精度測位を実現する手法のことである。受信機は企業や大学などがおのおののアルゴリズムを活用して製作している。
3 コンテナ自動運搬車
自動収穫されたキャベツは収穫機後方で外葉を手作業により除去し、コンテナに収納する。コンテナがいっぱいになった後、コンテナを運搬する車両が自動でドッキングし、コンテナが自動運搬車に移動する(写真6)。また自動運搬車に積載されていた空のコンテナが収穫機に自動で移動する。その後、収穫機は自動収穫を継続し、運搬車はトラック近くまでコンテナを自動運搬する。さらにコンテナは自動フォークリフトによってトラックに自動で積載される。なお、自動外葉除去と自動収納の機能は今年、開発予定である。

4 たまねぎ自動収穫機
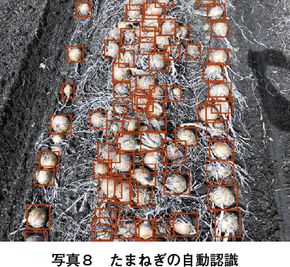
共同研究機関でもある訓子府機械工業製のたまねぎ収穫機を改造した車両(写真7)を使用し、これを自動化することによりたまねぎの自動収穫機を開発している。たまねぎの自動認識(写真8)などはキャベツの場合と同様の技術であるが、コンテナへの収納は収穫機に並走する自動運転トラクタ(写真9)がけん引する大型コンテナに自動収納する方式である。時間当たりの収量が多いことなどから、キャベツとは異なる収納方式を取っている。なお、今年、自動収納の機能や高速化(現在、秒速0.6メートルを1.0メートルまで)された車両を開発予定である。


5 おわりに
現在開発中のキャベツ自動収穫機に用いている技術と、コンテナ自動運搬車、たまねぎ自動収穫機を紹介した。これらの他に圃場の端でコンテナをトラックに積載する自動フォークリフトや精密防除ドローンを開発している。さらに、別プロジェクトであるが、果実や施設トマトの自動収穫ロボットなども開発中である。圃場条件や栽培方法の違いが自動化にどのように影響するかといった課題はあるが、ロボットを早期に実用化することで労働力不足を補い、農業を支えるために関係各所と協力を進めているところである。
深尾 隆則(ふかお たかのり)
【略歴】
1996年~京都大学大学院工学研究科応用システム科学専攻 助手
1998年~京都大学大学院情報学研究科システム科学専攻 助手
2004年~神戸大学工学部機械工学科 助教授
2007年~神戸大学大学院工学研究科機械工学専攻准教授
2015年~立命館大学理工学部電気電子工学科 教授